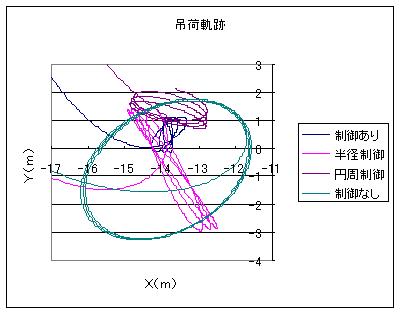
ジブクレーンで船からコンテナを荷下ろしする際、旋回終了時に吊荷が定位置直上で停止すれば、荷役効率を向上することができる。 しかし実際には遠心力の作用で吊荷が外方向に振られる為、ブームの起伏動作で外向きの動きを人為的に制御する必要がある。 この事例ではフィードフォワード制御のロジックを組み込んだ機構解析モデルで、この制御機能の効果を確認した。
機構解析に戻る