![]()
![]()
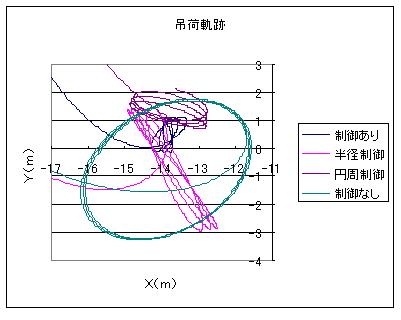
If cargo stops on a fixed position smoothly at the end of turning, while
unloading the container from the ship by the jib crane, the loading efficiency
can be improved greatly. However, because the container is shaken in the
outward direction by the action of the centrifugal force, it is necessary
to actively control its outward motion by raising operation of the boom.
By applying the mechanical analysis model with the logic of the feedforward
control confirmed the effect of this control operation.